01
G-code Modulator.
A browser-based tool I built to manipulate sliced G-code parametrically, going one level deeper than what any slicer or CAM tool exposes today.
Slicers expose layer-level controls: wall counts, infill density, layer heights. They do not expose the toolpath itself. The G-code Modulator I built works one level deeper: it ingests sliced G-code and applies parametric transforms directly to the X/Y/Z coordinates of every move. Layer lines, which slicers and printer manufacturers usually treat as defects to be hidden, become a deliberate design feature you can shape. The tool is live at gcode.dylanpires.com.
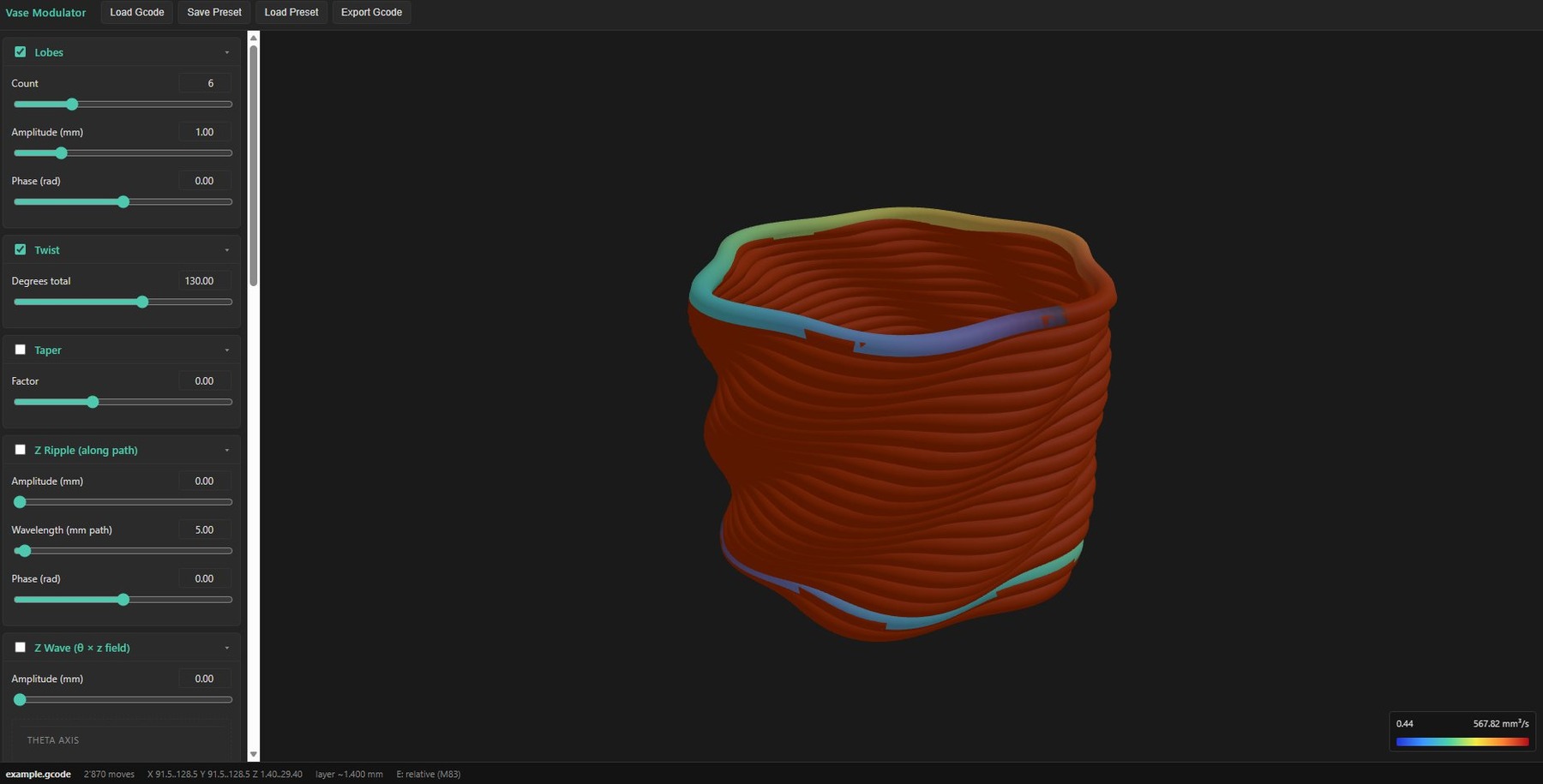
Fig. 1.1 - The G-code Modulator. Sliders drive parametric transforms; the viewer rebuilds the toolpath in real time.

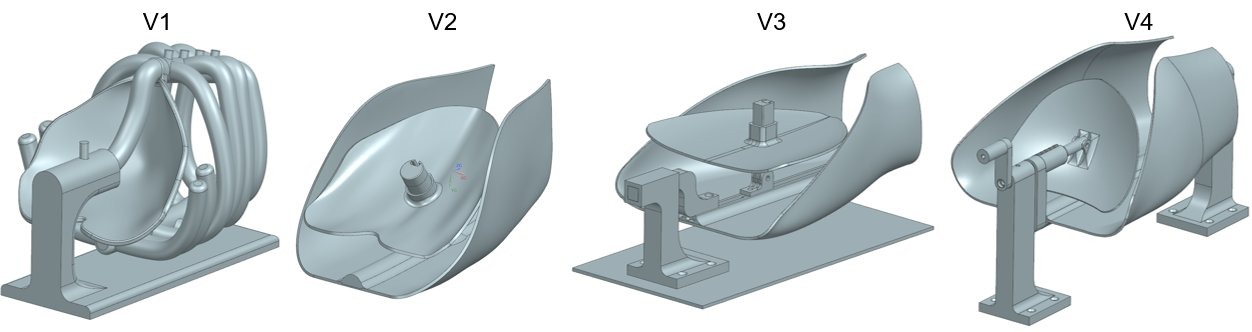
Fig. 1.2 - Example output #1
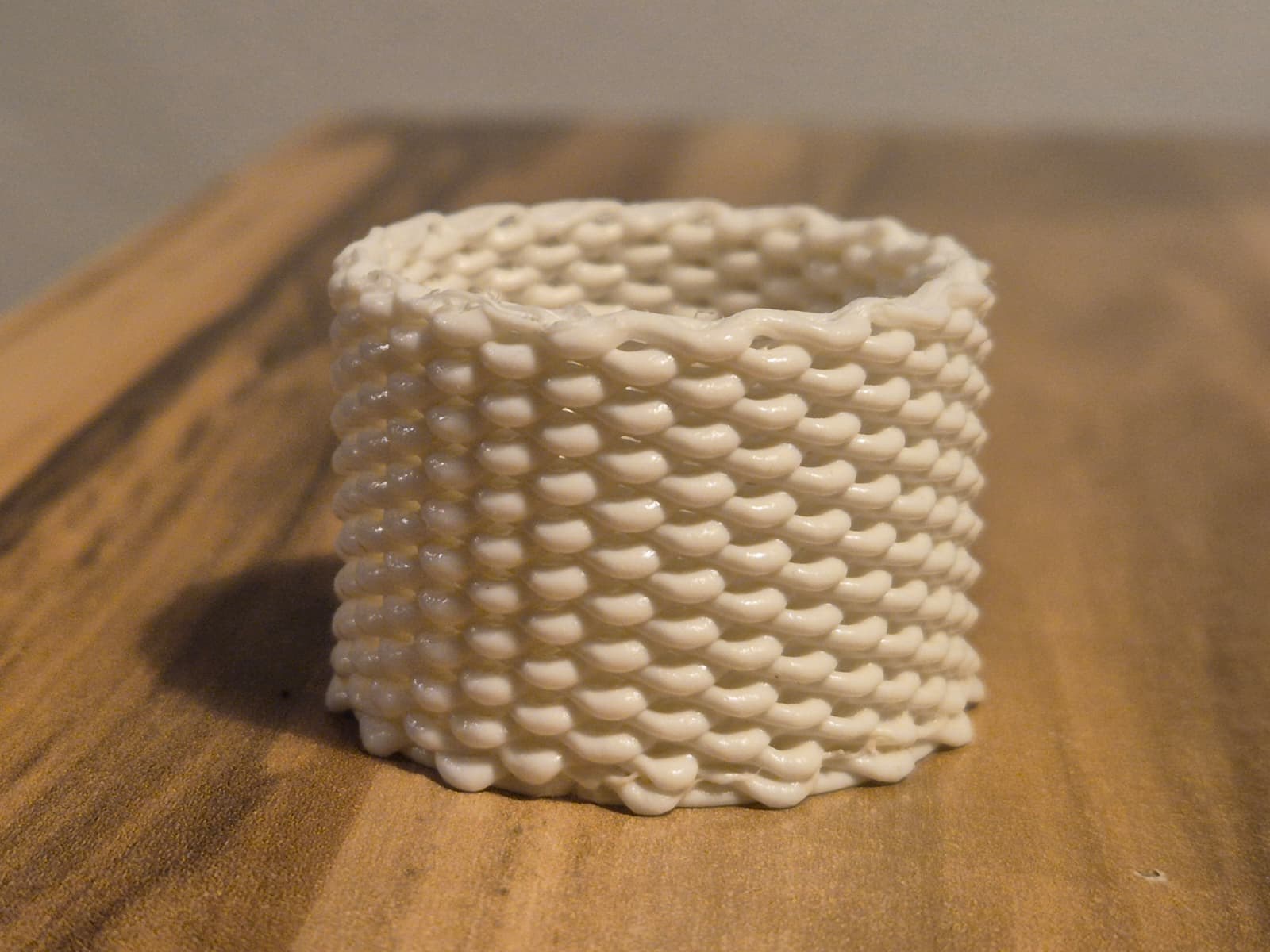
Fig. 1.3 - Example output #2

Fig. 1.4 - Example output #3

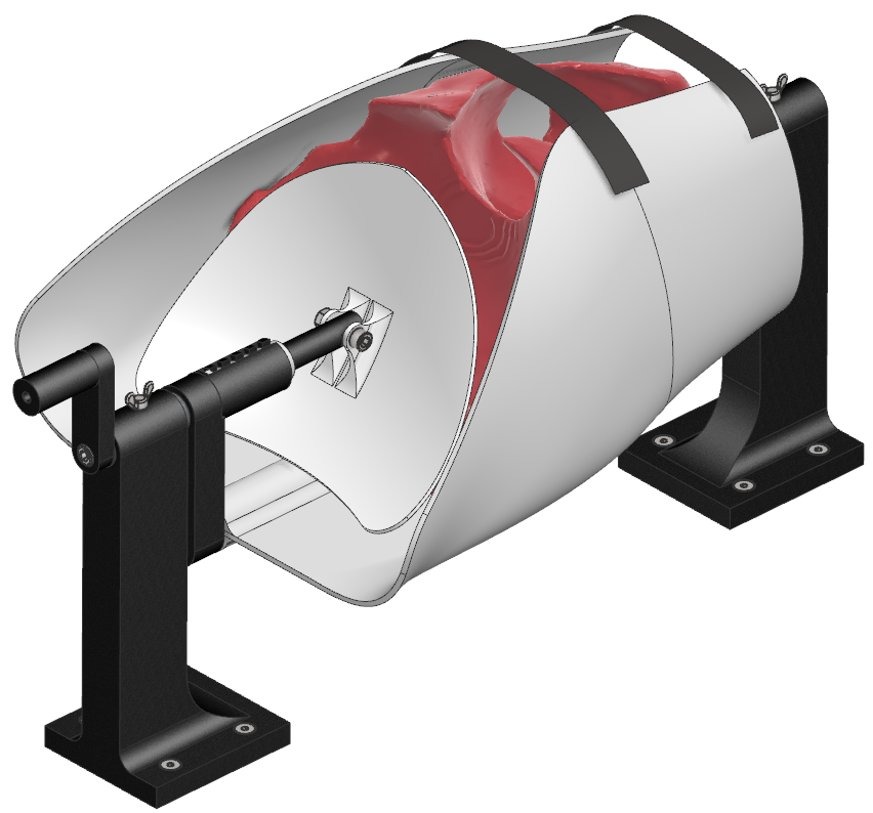
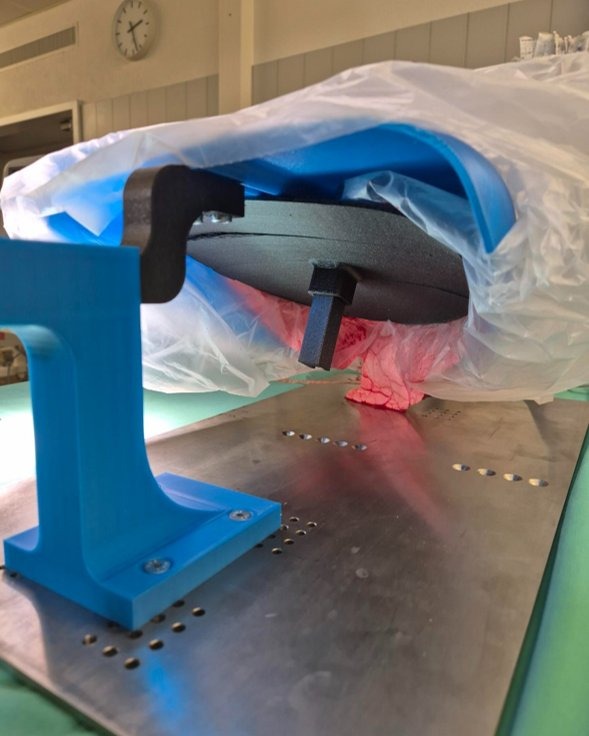
Fig. 1.5 - Functional part made with the tool: lampshade

Fig. 1.6 - Functional part made with the tool: plant pot
01 · G-code Modulator03